КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Двигательи пост тока с параллельным возбуждением. Запуск тороможение, регулирование оборотов
Двигатели с параллельным возбуждением.
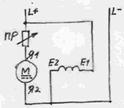 Здесь обмотка возбуждения и обмотка якоря соединены параллельно. Обмотка возбуждения имеет большее количество витков, чем обмотка якоря, поэтому ток обмотки возбуждения в большинстве случаев составляет несколько процентов от тока якоря. В цепь обмотки возбуждения может включаться регулировочный реостат. В цепь якоря включается пусковой реостат ПР.
Здесь обмотка возбуждения и обмотка якоря соединены параллельно. Обмотка возбуждения имеет большее количество витков, чем обмотка якоря, поэтому ток обмотки возбуждения в большинстве случаев составляет несколько процентов от тока якоря. В цепь обмотки возбуждения может включаться регулировочный реостат. В цепь якоря включается пусковой реостат ПР.

Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения
 Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление rд. Тогда сопротивление в уравнении (8) необходимо заменить на rя + rд.
Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление rд. Тогда сопротивление в уравнении (8) необходимо заменить на rя + rд.
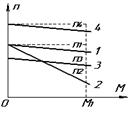
Как следует из уравнения (8), частота вращения n связана с сопротивлением цепи якоря rя + rд при постоянной нагрузке (М = const) линейной зависимостью, т.е. при увеличении сопротивления частота вращения уменьшается.
Изменение частоты вращения вторым способом осуществляется с помощью регулируемого источника напряжения UD2. Изменяя его напряжение регулятором R2, можно изменить ток возбуждения IВ и тем самым магнитный поток двигателя. Как видно из уравнения (8), при постоянной нагрузке (М = соnst) частота вращения находится в сложной зависимости от магнитного потока Ф. Анализ уравнения (8) показывает, что в некотором диапазоне изменения магнитного потока Ф уменьшение последнего приводит к увеличению частоты вращения. Именно этот диапазон изменения потока используют при регулировании частоты вращения.
Пуск двигателя (рис. 2.8,б) осуществляется с полностью включенным реостатом Rп от Mп> Мс (момента статического сопротивления). При моменте Mпер реостат Rп ступенчато переключается и происходит переход с одной характеристики на другую — с меньшим сопротивлением пускового реостата. Разгон якоря кончается с выходом на естественную характеристику при полностью выключенном реоcтате
Установившийся режим работы двигателя соответствует равенству моментов М = Мт при n = соnst. Из реостатных механических характеристик следует также, что при наличии пускорегулирующего реостата (резистора) Rпр в цепи якоря можно регулировать частоту вращения двигателя n , которая при данном тормозном моменте будет зависеть от сопротивления цепи якоря. Частота вращения уменьшается при увеличении сопротивления реостата Rпр
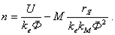
Естественная характеристика —прямая (см. рис. 2.8, а), строится по двум точкам (М = 0, n = nх) и (Мном, nном) на основании каталожных данных Рном, Uном, Iя. ном, Rя, nном и равенств (2.8),(2.11)


Отсюда частота вращения идеального XX двигателя (при М = 0) 
Искусственная характеристика для заданного сопротивления R; (прямая) строится также, по двум точкам n0 и Мном, но при n = n’ном — уже по реостатной характеристике, соответствующей сопротивлению в цепи якоря Rя + R. В этом случае номинальная частота вращения (см. рис. 2.8, а)
ИЛИ 
С увеличением сопротивления R в цепи якоря наклон механической характеристики (прямой) увеличивается — она становится более мягкой. Каждой ступени реостата соответствует своя искусственная характеристика двигателя. Все они проходят через точку n0 образуя семейство характеристик, (см. рис. 2.8,б).
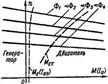
В двигателе параллельного возбуждения можно осуществит электрическое торможение: противовключением, генераторное (рекуперативное) и динамическое. Во всех этих режимах в электродвигателя создается тормозной момент, так как его электромагнитный момент действует встречно вращению якоря машины. Тормозные режимы работы двигателя параллельного возбуждения можно рассмотреть на механической хакрактеристике (рис. 2.9), продолжив ее в об стороны за пределы первого квадранта.
Торможение противовключениемобычно осуществляется изменением направления тока якоря на ходу двигателя, как при реверсировании. В этом случае электромагнитный момент двигателя меняет свое направление и действует встречно, т. е. тормозит вращающийся в прежнем направлении якорь. Такое торможение сопровождается значительным увеличением тока якоря. При переключении цепи якоря на торможение изменяется полярность напряжения U на якоре. Ток якоря резко увеличивается согласно уравнению(2.6) равен
Iя = (—U — Е) / Rя= —(U + Е) / Rя.
Для его ограничения в цепь якоря на время торможения последовательно вводится добавочный резистор сопротивлением Rт. Чтобы двигатель после торможения не начал вращаться в обратную сторону, при снижении частоты вращения до нуля его необходимо отключить от сети.
Режим противовключения двигателя может быть и без переключения цепи якоря, например при спуске груза подъемным краном, когда двигатель лебедки сдерживает опускание груза. Двигатель при этом включается на подъем груза, но его якорь под действием массы груза вынужден вращаться в обратную сторону — в сторону спуска груза.
Режиму противовключения на диаграмме (см. рис.2.9) соответствует участокАD механической характеристики. Допустим, что двигатель работает в точке Е участка АВ характеристики и вращается с частотой n1. При переключении цепи якоря ток Iя и вращающий момент М двигателя меняют скачкообразно значения и знаки при прежней частоте вращения n1 так как происходит переход на механическую характеристику С'D' в точку D'. Торможение двигателя соответствует режиму его работы в точке Dхарактеристики СD, где сохранены прежние знаки тока якоря и момента двигателя, но условно изменено направление вращения якоря с n1 на —n1. В процессе торможения состояние двигателя на характеристике изменяется от точки D' к точке A' на характеристике С'D' и от D к А на характеристике СD.
Дата добавления: 2015-04-21; просмотров: 95; Мы поможем в написании вашей работы!; Нарушение авторских прав |